%22%20d%3D%22M425.8%2C392.9c-41.5-7.2-83.5-6.3-117.2%2C4.1l-50.5%2C25.5v-4.9h-6.9V416h-5.6%0A%09c-44.7-26.9-97.8-34.7-159.5-23.1v-28.7c0-29.4%2C23.8-53.2%2C53.2-53.2H222c14.2%2C0%2C26.3%2C8.8%2C31.2%2C21.2h6.9v13.3%0A%09c6.8-24.6%2C29.3-42.6%2C56.1-42.6h0c8.9%2C0%2C16.1-7.2%2C16.1-16.1V158.3c0-29.9%2C24.3-54.2%2C54.2-54.2h39.2V346L425.8%2C392.9z%22%3E%3C%2Fpath%3E%0A%3Cpath%20d%3D%22M482.7%2C178.8H378.1c-4.4%2C0-8%2C3.6-8%2C8s3.6%2C8%2C8%2C8h39.6v188.6c-58.5-9.2-110-1-153.6%2C24.6V138.1%0A%09c42.5-27.9%2C94.1-37.1%2C153.6-27.2v45.9c0%2C4.4%2C3.6%2C8%2C8%2C8c0.8%2C0%2C1.6-0.1%2C2.3-0.3c0.7%2C0.2%2C1.5%2C0.3%2C2.3%2C0.3h43c4.4%2C0%2C8-3.6%2C8-8%0A%09s-3.6-8-8-8H469v-14.2c0-4.4-3.6-8-8-8s-8%2C3.6-8%2C8v14.2h-19.2v-44.6c0-3.9-2.7-7.2-6.5-7.9c-66.2-12.4-123.8-2.9-171.3%2C28.1%0A%09c-47.5-31-105.1-40.5-171.3-28.1c-3.8%2C0.7-6.5%2C4-6.5%2C7.9v22.4H50.3c-4.4%2C0-8%2C3.6-8%2C8v287.8c0%2C4.4%2C3.6%2C8%2C8%2C8h203.6%0A%09c0.6%2C0.1%2C1.2%2C0.2%2C1.7%2C0.2c0.1%2C0%2C0.2%2C0%2C0.3%2C0c0.1%2C0%2C0.2%2C0%2C0.3%2C0c0.6%2C0%2C1.2-0.1%2C1.7-0.2H461c4.4%2C0%2C8-3.6%2C8-8V194.8h13.8%0A%09c4.4%2C0%2C8-3.6%2C8-8S487.2%2C178.8%2C482.7%2C178.8z%20M58.3%2C142.5H78V366c0%2C4.4%2C3.6%2C8%2C8%2C8s8-3.6%2C8-8V110.9c59.5-9.8%2C111.1-0.7%2C153.6%2C27.2V408%0A%09c-45.9-26.9-100.7-34.7-163.1-23c-4.3%2C0.8-7.2%2C5-6.4%2C9.3c0.8%2C4.3%2C5%2C7.2%2C9.3%2C6.4c52.1-9.8%2C98.4-5.2%2C137.9%2C13.6H58.3V142.5z%0A%09%20M453%2C414.4H286.4c39.5-18.8%2C85.8-23.4%2C137.9-13.6c2.3%2C0.4%2C4.8-0.2%2C6.6-1.7c1.8-1.5%2C2.9-3.8%2C2.9-6.2V194.8H453V414.4z%22%3E%3C%2Fpath%3E%0A%3Cpath%20fill%3D%22%23FCCF31%22%20class%3D%22primary-color%22%20d%3D%22M80.7%2C19.7L19.8%2C80.7V19.7H80.7z%22%3E%3C%2Fpath%3E%0A%3Cpath%20d%3D%22M483.7%2C50.2c0%2C4.4-3.6%2C8-8%2C8h-15.8V74c0%2C4.4-3.6%2C8-8%2C8s-8-3.6-8-8V58.2h-15.8c-4.4%2C0-8-3.6-8-8s3.6-8%2C8-8h15.8V26.4%0A%09c0-4.4%2C3.6-8%2C8-8s8%2C3.6%2C8%2C8v15.8h15.8C480.1%2C42.2%2C483.7%2C45.8%2C483.7%2C50.2z%20M30.6%2C462.1c-5.9%2C0-10.8%2C4.8-10.8%2C10.8s4.8%2C10.8%2C10.8%2C10.8%0A%09s10.8-4.8%2C10.8-10.8S36.5%2C462.1%2C30.6%2C462.1z%20M228.4%2C26.7C213.9%2C26.7%2C202%2C38.5%2C202%2C53c0%2C4.4%2C3.6%2C8%2C8%2C8s8-3.6%2C8-8%0A%09c0-5.7%2C4.7-10.4%2C10.4-10.4s10.4%2C4.7%2C10.4%2C10.4c0%2C4.4%2C3.6%2C8%2C8%2C8s8-3.6%2C8-8C254.8%2C38.5%2C243%2C26.7%2C228.4%2C26.7z%22%3E%3C%2Fpath%3E%0A%3C%2Fsvg%3E) The Linux Programming Interface
The Linux Programming InterfacePDF 及笔记:
电脑上如果 PDF 不展示或者展示不正常,使用 Chrome 并安装 PDF Viewer 插件。其他情况请下载文件查看:tlpi-ch29。
部分笔记
Linux 对 POSIX pthread 标准的实现
POSIX 标准定义了一套线程机制和 API 标准,称为 pthread。
Linux 实现了 pthread 标准,该实现被称为 NPTL(Native POSIX Threads Library)。旧的 Linux 版本的实现为 LinuxThreads,目前已不主流。
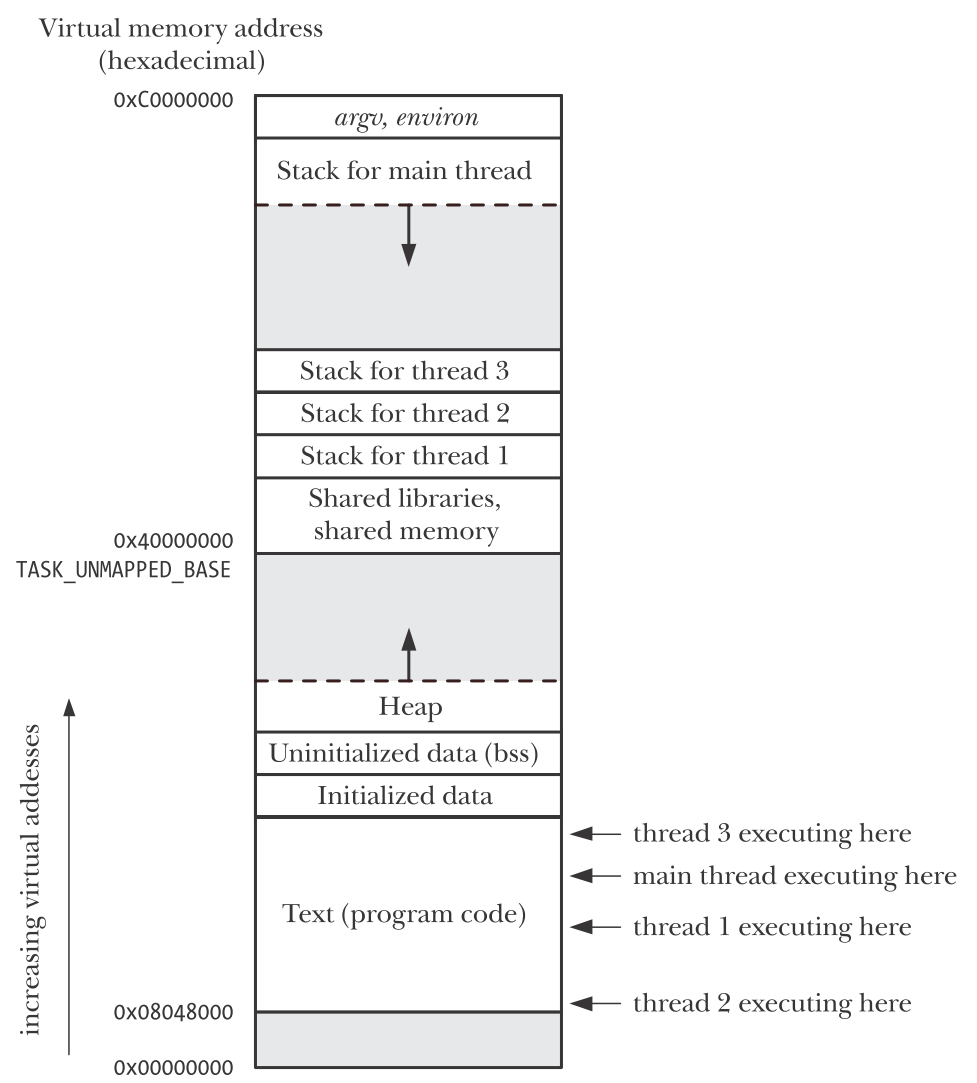
多线程程序的内存布局
pthread API 的返回值风格
一般系统调用的 API,其返回值为 0 表示成功、-1 表示失败;具体失败原因从 errno 中取。
pthread API 不同,0 表示成功,正整数表示失败,且其值同 errno 定义的一致。
不同线程拥有自己的 errno。在 Linux 上,读取 errno 实际上是通过一段 macro 将其转化为一个函数调用(而不是读一个全局变量)。
线程间共享和不共享的数据
Besides global memory, threads also share a number of other attributes (i.e., these attributes are global to a process, rather than specific to a thread). These attributes include the following:
- process ID and parent process ID;
- process group ID and session ID;
- controlling terminal;
- process credentials (user and group IDs);
- open file descriptors;
- record locks created using fcntl(); z signal dispositions;
- file system–related information: umask, current working directory, and root directory;
- interval timers (setitimer()) and POSIX timers (timer_create());
- System V semaphore undo (semadj) values (Section 47.8);
- resource limits;
- CPU time consumed (as returned by times());
- resources consumed (as returned by getrusage()); and
- nice value (set by setpriority() and nice()).
Among the attributes that are distinct for each thread are the following:
- thread ID (Section 29.5);
- signal mask;
- thread-specific data (Section 31.3);
- alternate signal stack (sigaltstack());
- the errno variable;
- floating-point environment (see fenv(3));
- realtime scheduling policy and priority (Sections 35.2 and 35.3);
- CPU affinity (Linux-specific, described in Section 35.4);
- capabilities (Linux-specific, described in Chapter 39); and
- stack (local variables and function call linkage information)
线程结束自身运行的数种方式
- The thread’s start function performs a return specifying a return value for the thread.
- The thread calls pthread_exit() (described below).
- The thread is canceled using pthread_cancel() (described in Section 32.1).
- Any of the threads calls exit(), or the main thread performs a return (in the main() function), which causes all threads in the process to terminate immediately
值得注意的是最后一种方式,无论哪个线程调用了 exit(),整个程序、所有线程都会马上结束。
编码考虑点
调用完 pthread_create() 后,操作系统并不保证马上调度到该线程运行。
线程执行完后,其返回值(一般是指针)不该指向线程的栈。因为这块内存区域在线程结束后会被 OS 回收利用。
线程间等待结束的机制
线程间等待结束和回收资源 pthread_join() 与进程间 waitpid() 不同之处:
- 不同线程之间是对等关系,任意线程可以调用
pthread_join()等待其他任意进程结束;进程间则需要是父进程回收子进程 - 由于线程间并没有父子关系,pthread 没有提供一个可以 join 任意线程的 API(进程则有)
- 如果可以 join 任意线程,可能会把当前进程使用的第三方库的线程也 join 了,引起混乱
- pthread 设计上希望线程只 join 自己知道(known)的其他线程
- 但是 pthread 提供了 condition variables 机制可以模拟这一效果
线程与进程对比
章末总结的线程与进程对比,是本章的 重点。
- 共享数据:
- 线程比进程容易;进程需要额外的 IPC 代码
- 线程间读写数据,需要额外的同步机制,避免同时写同块数据
- 创建和调度成本:线程低一个数量级
- 使用第三方库的考虑:多线程时需要开发者确认使用的库是否是线程安全的;如果不是,需要以线程安全的方式调用它。多进程没有此问题
- 线程间共享虚拟内存地址带来的问题:
- 如果一个线程出现 bug,错误地修改了另外一个线程的内存,可能引起很难定位的 bug;进程无此问题
- 同一进程的多个线程,其所使用的虚拟内存总和不能超过单进程的限制(比如 x86-32 中的 3G);而多进程时,每个进程都能使用 3G。当然在 64 位系统普遍的今天不是什么大问题
- 多线程在其他编程上的考虑点:
- 信号处理:很难正确的处理,因此多线程程序一般不配合使用信号机制
- 多线程运行的代码只能来自一个可执行程序(尽管可能是不同的函数);多进程则可以运行不同程序
- 多线程还共享了 fd、当前工作目录、user / group ID 等;视情况可能是优点也可能是缺点